






 Рейтинг: 4.7/5.0 (1668 проголосовавших)
Рейтинг: 4.7/5.0 (1668 проголосовавших)Категория: Программы
Алгоритмы и программы движения по линии робота Lego Mindstorms EV3 — В книге рассмотрены алгоритмы движения робота Lego Mindstorms EV3 по линии от простых до профессиональных, предназначенных для скоростного движения по сложным траекториям. Представлены варианты прохождения инверсии, перекрестков, штрих-кодов, прерывистой линии и объезда препятствий.
Алгоритмы и программы движения по линии робота Lego Mindstorms EV3 — В книге рассмотрены алгоритмы движения робота Lego Mindstorms EV3 по линии от простых до профессиональных, предназначенных для скоростного движения по сложным траекториям. Представлены варианты прохождения инверсии, перекрестков, штрих-кодов, прерывистой линии и объезда препятствий. Все алгоритмы сопровождаются подробным объяснением и программным кодом.
Книга будет полезна педагогам начального, среднего, высшего и дополнительного образования, учащимся, студентам и всем, интересующимся вопросами робототехники.
Название: Алгоритмы и программы движения по линии робота Lego Mindstorms EV3
Автор: Овсеницкая Л. Ю.
Издательство: Перо
Год: 2015
Страниц: 170
Формат: PDF
Размер: 12,63 Мб
Качество: Отличное
Скачать Алгоритмы и программы движения по линии робота Lego Mindstorms EV3
Post navigation
















![]()
Тип файла: Team Manager Meet Event File Разработчик: HY-TEK Sports Software Категория: Данные
Файл,создаваемый HY-TEK Team Manager — программой, используемой для создания расписаний спортивных мероприятий. Содержит информацию о названии встречи, ее ходе, событиях и времени начала, а также высоте, номере разрешения, времени старта, разделение событий и максимальное количество участников.
Файлы EV3 применяются для хранения, распространения и назначения спортивных мероприятий с участниками.
Чем открыть файл в формате EV3 (Team Manager Meet Event File)
HY-TEK Sports Team Manager
![]()
Тип файла: Everlock Options File Разработчик: Az-Tech Software Категория: Настройки
Файл,используемый Everlock — программой, применяемой для защиты копий дискет, CD и других медиа. Содержит опции для защиты копий. Применяется для создания инсталляционных медиа-файлов с определенными реквизитами защиты копий.
Everlock больше не поддерживается компанией Az-Tech.
Чем открыть файл в формате EV3 (Everlock Options File)
Другие похожие форматы и расширения файлов
© 2012-2017 AZFiles
Подробности Категория: Советы Просмотров: 3014
Рейтинг: 5 / 5

Компания Lego постоянно работает над улучшением среды программирования и встроенного программного обеспечения модуля EV3. Поэтому, с появлением новых версий рекомендуется производить обновление программного обеспечения.
Как узнать, что появилось какое-либо обновление? Среда программирования Lego mindstorms может сама при запуске проверять через интернет наличие обновлений и уведомлять пользователя. Необходимо лишь разрешить ей делать это, установив соответствующий флажок в окне, вызываемом командой "Главное меню"-"Справка"-"Проверить наличие обновлений" .

Как только появится обновление – среда программирования вас об этом уведомит. Вам необходимо будет пройти по ссылке, загрузить и установить обновленную версию программного обеспечения. Обновление среды программирования ничем не отличается от первоначальной установки: просто следуйте инструкциям на экране установки программы.

Модуль EV3 конструктора Lego mindstorms является сложным устройством, схожим по конструкции, например, с компьютерами или современными смартфонами. Внутри модуля EV3 в специальной области памяти расположено встроенное программное обеспечение, отвечающее за взаимодействие модуля с датчиками, моторами и выполняющее загруженные в него программы. Это встроенное программное обеспечение часто именуется прошивкой.
В чем особенность обновления встроенного программного обеспечения модуля EV3?Как вы уже знаете - компания Lego разрабатывает и сопровождает две версии среды программирования: домашнюю и образовательную. Так же существуют и две версии прошивок модуля EV3. Какой версии принадлежит прошивка – понятно из её названия: домашняя версия содержит в названии порядковый номер и литеру H (сокращение от Home) - (EV3 Firmware V1.09H), образовательная – порядковый номер и литеру E (сокращение от Education) - (EV3 Firmware V1.09E). В любой модуль EV3 можно загружать и домашнюю, и образовательную версию встроенного ПО, поэтому в выборе прошивки ориентируйтесь на версию среды программирования, которую вы используете.
Подготовка модуля EV3 и процесс обновления встроенного ПОПредупреждение: процедура обновления встроенного ПО модуля EV3 полностью стирает все программы во внутренней памяти и восстанавливает первоначальные настройки в модуле, сбрасывая сохраненные подключения!
В первую очередь следует убедиться, что аккумуляторы заряжены или установлены исправные батареи в отсек питания модуля EV3. Далее необходимо включить модуль EV3 и, используя USB-кабель, подключить его к компьютеру.
Затем загружаем среду программирования. Если среда программирования определит, что необходимо обновить прошивку модуля EV3, то выдаст вам соответствующее предупреждение. Вам останется нажать кнопку "Обновить встроенное ПО" и дождаться завершения загрузки прошивки в модуль EV3. По завершению загрузки модуль EV3 будет автоматически перезагружен.

Если же вы желаете самостоятельно выполнить загрузку прошивки, то следует выполнить следующие действия:


Если по какой-либо причине модуль EV3 прекратит работу во время обновления встроенного ПО, вы должны будете обновить встроенное ПО вручную, выполнив следующие шаги (для модуля EV3 все равно требуется USB-подключение к компьютеру):
1. Нажмите и удерживайте кнопку "Назад". центральную кнопку и кнопку "Вправо" на модуле EV3.
2. При перезапуске модуля EV3 отпустите кнопку "Назад" .
3. Когда на экране появится надпись "Updating. ". отпустите центральную кнопку и кнопку "Вправо" и нажмите кнопку "Обновить встроенное ПО" в инструменте обновления встроенного ПО. Встроенное ПО будет загружено на ваш модуль EV3, который перезапустится самостоятельно.

Если ваш модуль EV3, оставаясь во включенном состоянии, внезапно перестает реагировать на любые нажатия кнопок, и завершить его работу в обычном порядке невозможно, вам потребуется принудительно перезапустить модуль EV3. При перезапуске модуля EV3 существующие папки и проекты предыдущих сеансов не стираются из памяти модуля EV3. Файлы и проекты текущего сеанса будут утеряны.
1. Убедитесь, что модуль EV3 включен.
2. Нажмите и удерживайте кнопку «Назад». центральную кнопку и кнопку «Влево» на вашем модуле EV3.
3. Когда изображение на экране исчезнет, отпустите кнопку «Назад» .
4. Когда на экране появится «Запуск». отпустите центральную кнопку и кнопку «Влево» .
Внимание!
Возрастная категория посетителей сайта - (10+).
Все комментарии перед публикацией проходят модерацию.
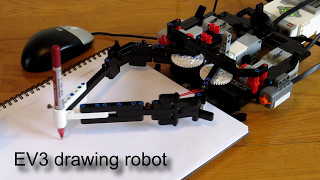
Сегодня ребята из команды "Карандаш и Самоделкин" снова будут решать вместе с вами задачки по робототехнике. Программировать робота для решения задач мы будем на новом языке программирования EV3 BASIC.
EV3 BASIC - свободно распространяемая среда программирования для платформы LEGO Mindstorms EV3, основанная на языке Бейсик.
Наш перевод EV3 BASIC на русский язык вошел в новую версию среды программирования 1.0.9, которая уже доступна для скачивания.
Инструкцию по сборке робота и программы из этой серии вы сможете скачать в разделе Инструкции по сборке
Инструкция на учебного робота доступна в двух форматах - 3D модель в LEGO Digital Designer и пошаговая сборка в PDF.

Задача 1: Робот должен при первом нажатии датчика касания определиться с направлением движения (короткое - назад, длинное - вперед), при втором - с расстоянием, которое необходимо проехать в указанном направлении (чем дольше нажата кнопка - тем дальше едет робот), затем начать движение.
Sensor.SetMode(4,0)
While Sensor.ReadPercent(4) = 0
EndWhile
A = EV3.Time
While Sensor.ReadPercent(4) = 100
EndWhile
B = EV3.Time
X = B - A
Program.Delay(1000)
While Sensor.ReadPercent(4) = 0
EndWhile
A = EV3.Time
While Sensor.ReadPercent(4) = 100
EndWhile
B = EV3.Time
z = A - B
If X > 1000 Then
Motor.Schedule("BC",100,z / 3,z / 3,z / 3,"True")
Motor.Wait("BC")
Else
Motor.Schedule("BC",-100,z / 3,z / 3,z / 3,"True")
Motor.Wait("BC")
EndIf
Задача 2: Робот вращается вокруг своей оси в поисках кегель, запоминя азимут самой дальней и самой ближней кегли (по гироскопу или энкодерам моторов). Затем выводит на экран расстояния до ближайшей и самой дальней кегли, а также азимуты на них. После этого робот с плавным ускорением и замедлением выбивает ближайшую кеглю.
Sensor.SetMode(1,0)
Sensor.SetMode(3,0)
Sensor.SetMode(2,0)
Sensor.SetMode(2,1)
Sensor.SetMode(2,0)
Sensor.SetMode(2,1)
Sensor.SetMode(2,0)
Bl_Keg = 100
Dl_keg = 0
Am_Bl_Keg = 0
Am_Dl_keg = 0
loop = "True"
Motor.StartSync("BC", 10, -10)
Gyro = Sensor.ReadRawValue(2,0)
IR = Sensor.ReadRawValue(1,0)
If Gyro < -360 Then
loop = "False"
EndIf
If IR < Bl_Keg Then
Bl_Keg = IR
Am_Bl_Keg = Gyro
EndIf
If IR > Dl_keg Then
Dl_Keg = IR
Am_Dl_keg = Gyro
EndIf
LCD.Clear()
LCD.Text(1, 0, 0, 1, Bl_keg)
LCD.Text(1, 50, 0, 1, Am_Bl_keg)
LCD.Text(1, 0, 20, 1, Dl_keg)
LCD.Text(1, 50, 20, 1, Am_Dl_keg)
Motor.StartSync("BC", -10, 10)
While Sensor.ReadRawValue(2,0) < Am_Bl_Keg - 5
EndWhile
Motor.Stop("BC", "True")
Motor.Schedule("BC", 30, 100, 10000, 100, "True")
While Sensor.ReadPercent(3) > 25
EndWhile
Motor.Stop("BC","False")
Motor.Schedule("BC", 30, 0, 0, 100, "True")
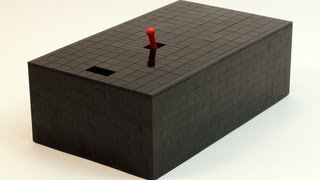
Задача 3: Усложненный кегельринг. Робот должен выбить все кегли за пределы круга, при этом подвижный флажок, установленный на роботе должен всегда смотреть в направлении старта робота.
Sensor.SetMode(2,0)
Sensor.SetMode(2,1)
Sensor.SetMode(2,0)
Sensor.SetMode(1,0)
Sensor.SetMode(3,0)
Sensor.SetMode(4,0)
Sub FLAG
Motor.ResetCount("A")
Pk = 0.15
Kk = 0.0001
While "True"
Er = Sensor.ReadRawValue(2,0) + Motor.GetCount("A")
V = Er*Pk + Er*Er*Er*Kk
Motor.Start("A",-V)
EndWhile
EndSub
While Sensor.ReadPercent(4) < 50
Program.Delay(1)
EndWhile
While "True"
Motor.StartSync("BC", S, -S)
If Sensor.ReadPercent(1) < 63 Then
Motor.Stop("BC","True")
Motor.ResetCount("BC")
Motor.StartSync("BC", 50, 50)
While Sensor.ReadPercent(3) > 25
Program.Delay(1)
EndWhile
Motor.Stop("BC","True")
Motor.MoveSync("BC", -50, -50, Motor.GetCount("C"), "True")
Motor.Stop("BC","True")
EndIf
Задача 4: Робот, двигаясь по линии, должен останавливаться перед препятствием и ожидать, пока его не уберут. Кроме этого должна быть возможность поставить робота "на паузу" по датчику-кнопке.
Pk = 0.09
Kk = 0.0016
Sp = 30
Ser = 48
Stop = 1
Trigger = 1
Sub Start_Stop
While "True"
If Sensor.ReadRawValue(1,0) < 40 Then
Stop = 0
Else
Stop = 1
EndIf
If Sensor.ReadPercent(4) > 50 Then
If Trigger = 0 Then
Trigger = 1
Else
Trigger = 0
EndIf
Speaker.Note(75, "D5", 1000)
Speaker.Wait()
EndIf
EndWhile
EndSub
While "True"
Er = Sensor.ReadPercent(3) - Ser
V = Er*Pk + Er*Er*Er*Kk/10
Motor.StartSync("BC", (Sp+V) * Stop * Trigger, (Sp-V) * Stop * Trigger)
EndWhile
Задача 5: Движение по "восьмерке", используя только датчик-гироскоп.
Sensor.SetMode(2,0)
Sensor.SetMode(2,1)
Sensor.SetMode(2,0)
Sensor.SetMode(2,1)
Sensor.SetMode(2,0)
Napr = 0
Er = 0
Pk = 1.8
Kk = 0.003
Sp = 20
Sub NAPRAVLENIE
While "True"
For Napr = 0 To 360
Program.Delay(30)
EndFor
For Napr = 360 To 0 Step -1
Program.Delay(30)
EndFor
While "True"
Er = Napr - Sensor.ReadRawValue(2,0)
V = Er * Pk + Er * Er * Er * Kk
Motor.StartSync("BC", Sp-V, Sp+V)
EndWhile

![]()
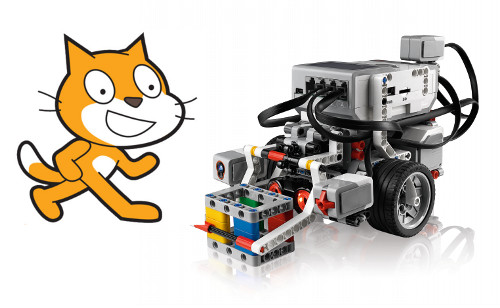
Если вам нравится графическая среда программирования Scratch 2.0, то вам необязательно отказываться от неё для программирования роботов Lego Mindstorms EV3. Достаточно лишь установить и настроить нужное программное обеспечение, о чём и будет написано в этой статье.
Статья будет рассчитана на владельцев компьютеров под управлением Windows, хотя всё упомянутое в статье программное обеспечение можно установить и использовать на компьютерах под управлением Mac OS. Mac OS X и Linux. Вот вкратце план, по которому мы будем действовать:
Прежде, чем начинать, что то делать дальше, нужно найти подходящую SD-карту. удалить с неё все лишние разделы, которые там могут оказаться, и отформатировать её. Это должна быть карта объёмом как минимум 2Гб. но не более 32Гб (SDXC-карты не поддерживаются модулем EV3). Файловая система на карте должна быть FAT32. Разработчики leJOS рекомендуют форматировать карту с помощью программы SD Card Formatter. Ведь, даже если вы решили использовать только что купленную карту памяти, на ней могут быть скрытые разделы, которые могут вызвать проблемы при работе c EV3. Однако, если ваша SD-карта меньше 4Гб, то программа автоматически выбирает файловую систему FAT и изменить в настройках это нельзя, поэтому после форматирования программой SD Card Formatter форматируйте такие карты в формат FAT32 другим способом. Кроме того, у меня при использовании старых карт 2Гб. leJOS EV3 вообще отказался загружаться, хотя установка прошла успешно. Из своего опыта я советую вам использовать свежекупленные карты SDHC объёмом 4 – 32Гб (у меня всё успешно работает с картой SDHC объёмом 4Гб класс 4 производства smartbuy ).
leJOS – это крошечная виртуальная Java-машина. которая в 2013 году была адаптирована для работы с системой Lego Mindstorms EV3. Официальная страничка проекта находится здесь. Для компьютеров под управлением Windows разработчики сделали дистрибутив, в котором есть утилита для подготовки SD-карты. документация и примеры.
Итак, установим leJOS EV3 на компьютер:
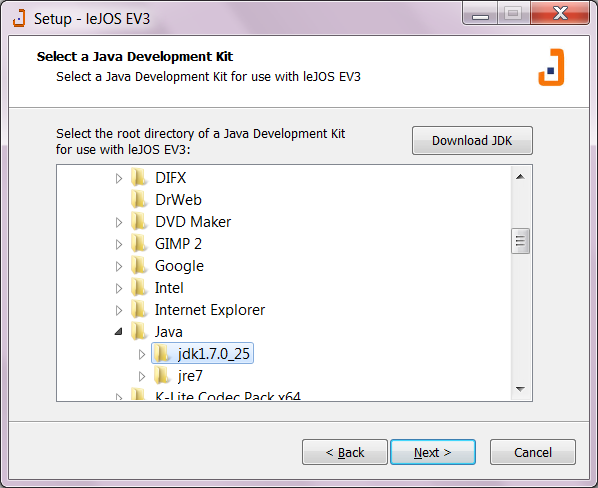
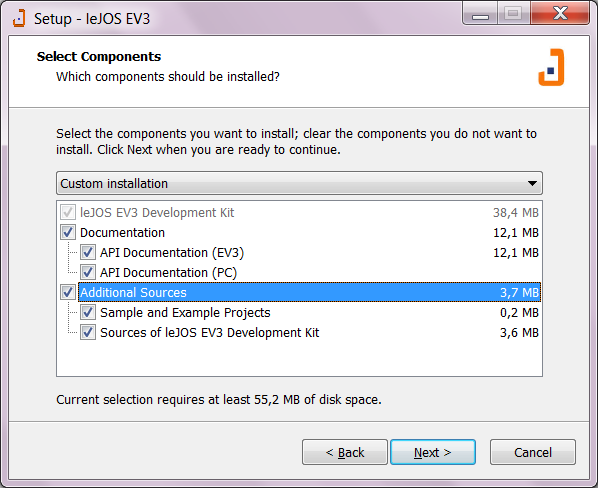
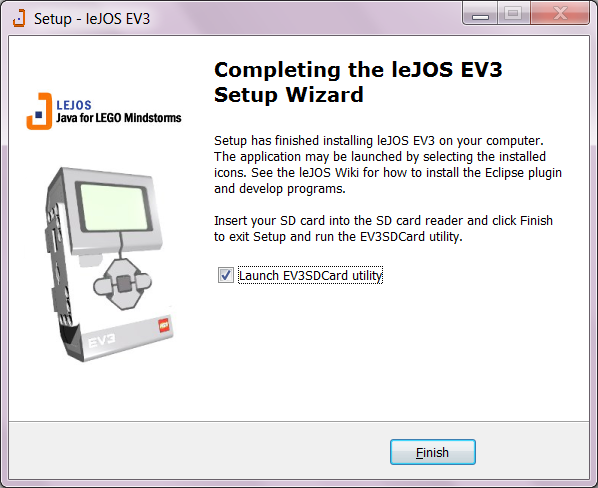
Нажмите кнопку «Finish» с установленной галочкой «Launch EV3SDCard utility » после установки компонентов leJOS EV3 на компьютер или запустите утилиту вручную, для этого запустите файл ev3sdcard.bat. который находится в папке bin, внутри папки, в которую вы установили leJOS EV3 (у меня это папка «C:\Program Files\leJOS EV3\bin »). После запуска у вас должно появиться окошко, изображённое на картинке снизу.
В верхнем поле нужно выбрать букву диска вашей карты, у меня это диск I:. В поле ниже указывается файл с образом leJOS и по умолчанию у вас уже должен быть прописан правильный путь, см. картинку сверху. Этот файл можно найти в папке, куда были установлены компоненты leJOS EV3 (у меня это «C:\Program Files\leJOS EV3 »). В самом нижнем поле нужно выбрать файл со средой выполнения Java, который вам предварительно нужно скачать с сайта Oracle отсюда (убедитесь, что вы выбрали Java 7 JRE. а не Java 8 SDK. если конечно вы не планируете создавать компактный профиль Java 8 ). Для скачивания вам нужно будет зарегистрироваться, если вы этого ещё не делали.
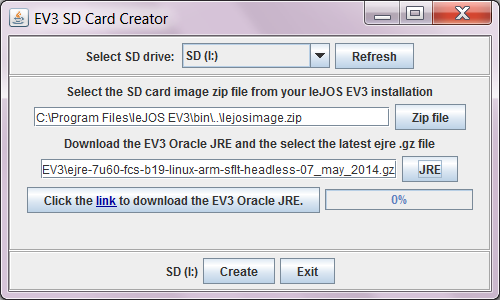
Когда все поля будут заполнены, нажмите на кнопку «Create», и после того как на SD-карту будут скопированы необходимые файлы вы увидите подобное сообщение:
Нажмите «OK», затем закройте окно программки и безопасно извлеките карту из компьютера. Затем вставьте её в выключенный модуль EV3 и включите его, нажав центральную кнопку. Вы должны будете увидеть логотип leJOS EV3 и прогресс форматирования и установки образа SD-карты. Это занимает порядка 8-ми минут. В конце этого процесса модуль EV3 перегрузится и вы должны увидеть меню leJOS EV3 .
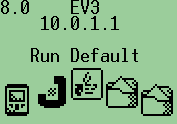
В дальнейшем, при включении модуля EV3 со вставленной SD-картой leJOS EV3 у вас сразу начнётся загрузка leJOS EV3. а без SD-карты загрузится стандартное ПО LEGO.
Перед установкой офлайн редактора Scratch, необходимо обновить или установить на компьютер последнюю версию Adobe AIR. Описывать установку я не буду, она очень простая. Нужно скачать инсталлятор здесь. запустить его, ответить на несколько вопросов и дождаться окончания установки.
Теперь скачайте и установите на компьютер последнюю версию офлайн редактора Scratch 2 (на момент написания статьи – это версия 437, файл Scratch-437.exe ). У инсталлятора очень мало параметров, см. картинку. Уберите галочку «Запустить приложение после установки » и нажмите кнопку «Продолжить ».
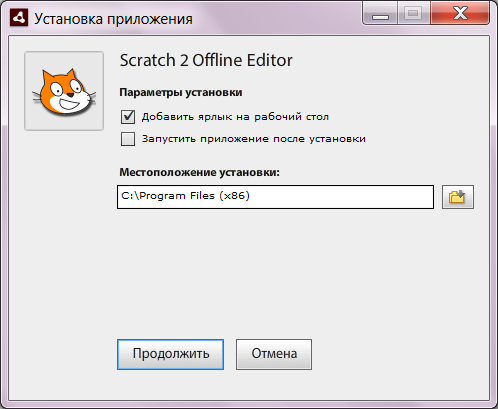
После установки вы увидите следующее сообщение, см. картинку. Щёлкните по кнопке «Готово ».
Следующее что нужно сделать – установить приложение-помощник ev3-scratch-helper-app на ваш компьютер, которое делает возможным взаимодействие Scratch с модулем EV3 (прочитать про приложения-помощники для Scratch можно здесь ). Установку можно произвести двумя способами:
В папке «scratch» внутри папки установки вы можете найти файл «ev3-helper-app.s2e » для английского и файл «ev3-helper-app-NL.s2e » нидерландского языков, соответственно, в папках «en» и «nl». Если вы хотите использовать русский язык, то вы можете самостоятельно перевести файл «ev3-helper-app.s2e » (кодировка файла д.б. UTF-8 ) или взять файл «ev3-helper-app-RU.s2e » с моим переводом (файл «ev3-helper-app-RU.s2e » сохраните по аналогии с английской и нидерландской версией: сделайте папку «ru\extensions » и сохраните в ней). К сожалению, перевести можно лишь названия блоков, но не значений, иначе приложение ev3-scratch-helper-app работать не будет. Т.е. название моторов и датчиков останется на английском (для моторов это «Large» и «Medium», для датчиков – «Color», «Distance» и «Touch» и т.д.).
Файл ev3-helper-app-RU.s2e для русификации блоков EV3 в офлайн редакторе Scratch 2.
 07.08.2015
07.08.2015  3.76 KB
3.76 KB  887
887

В папке с приложением вы можете найти файл «application.properties » с настройками. Измените настройки, если потребуется. Имена свойств говорят сами за себя, поэтому расписывать их здесь я не буду. После изменения, удостоверьтесь, что значение свойства «server.port » в файле «application.properties » равно значению переменной «extensionPort » в файле «ev3-helper-app.s2e » или «ev3-helper-app-RU.s2e », в зависимости от того, файл какого языка вы будете использовать.
Перед запуском редактора Scratch 2 у вас всегда должно быть запущено приложение ev3-scratch-helper-app. Для его запуска сделайте следующее:
После того как приложение запустится вы увидите в консоли примерно следующие сообщения:
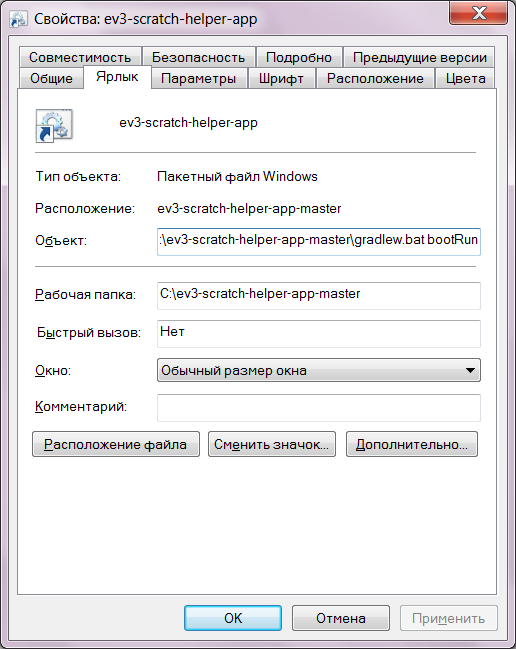
Для последующих запусков для удобства можно создать ярлык, например, на рабочем столе. Вот так выглядят свойства ярлыка для установленного приложения в папке «C:\ev3-scratch-helper-app »:
При запуске приложение ev3-scratch-helper-app подключается к первому доступному модулю EV3 в сети. Если ни один модуль не обнаружен, то приложение ждёт, пока такой появится.
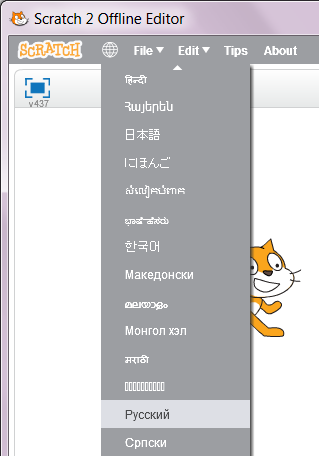
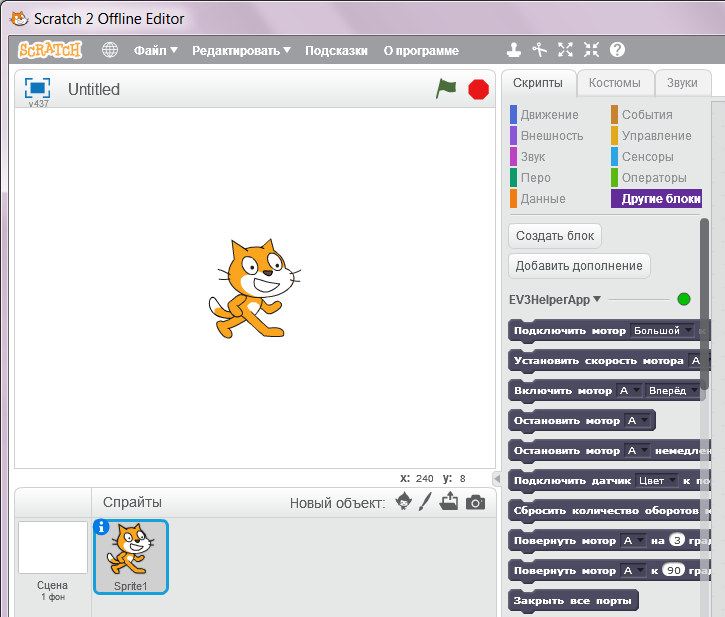
После запуска редактора Scratch 2 первый раз (у вас должен быть ярлык «Scratch 2 » на рабочем столе) вы, возможно захотите поменять язык на русский. Выбор языка выполняется из меню с изображением глобуса, см. картинку.
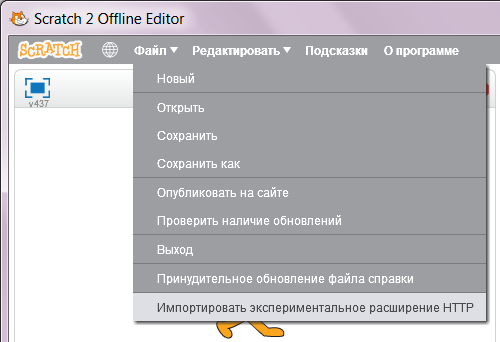
После запуска у вас автоматически создаётся новый пустой проект. Теперь для этого проекта нужно импортировать блоки EV3, для этого удерживая клавишу «Shift» щёлкните по меню «Файл -> Импортировать экспериментальное расширение HTTP » и выберите файл ev3-helper-app.s2e или ev3-helper-app-RU.s2e. в зависимости от предпочитаемого языка. Я выбрал файл «C:\ev3-scratch-helper-app-master\scratch\ru\extensions\ev3-helper-app-RU.s2e ». Эту процедуру нужно будет делать один раз для каждого нового проекта.
После этого откройте закладку «Скрипты » щёлкните по «Другие блоки » и удостоверьтесь, что здесь появились наши блоки. Проверку наличия блоков желательно делать каждый раз после открытия ранее сохранённого проекта. Зелёный кружочек справа от названия «EV3HelperApp » означает, что приложение v3-scratch-helper-app выполняется. Если кружочек красный, то это значит, что приложение v3-scratch-helper-app не выполняется и его нужно запустить.
Подключить модуль EV3 к компьютеру можно двумя способами: через Bluetooth или WiFi.
Для подключения через WiFi у вас должен быть USB WiFi адаптер. leJOS EV3 поддерживает адаптеры с чипсетами Atheros ATH9K и Realtex 8192cu. Модуль EV3 протестирован разработчиками с адаптерами NetGear WNA1100 и EDIMAX EW-7811Un. но и другие адаптеры могут поддерживаться, если в них используется один из перечисленных чипсетов. Здесь я не буду рассматривать подключение через WiFi, т.к. не у всех есть подходящий адаптер. Но если вы заинтересовались таким подключением, то вы можете узнать, как это сделать из официального источника здесь .
Для подключения через Bluetooth вам нужно сначала подключить друг к другу модуль EV3 и компьютер, а затем сделать личную сеть Bluetooth (PAN).
Подключение модуля EV3 к компьютеру нужно сделать только один раз для пары «модуль EV3 – компьютер »:
1. В модуле EV3 в главном меню leJOS EV3 найдите пункт меню «Bluetooth» и зайдите внутрь, нажав на кнопку центральную кнопку модуля EV3. Если вы увидите надпись «Visibility on », то всё в порядке: видимость модуля включена. Если вы видите надпись «Visibility off », то найдите пункт меню «Visibility» (с изображением глаза) и нажмите на центральную кнопку модуля EV3 дважды, чтобы включить видимость (надпись должна поменяться на «Visibility on »).
2. На компьютере откройте «Панель управления -> Оборудование и звук -> Устройства и принтеры ». Вы увидите список устройств, подключенных к вашему компьютеру.
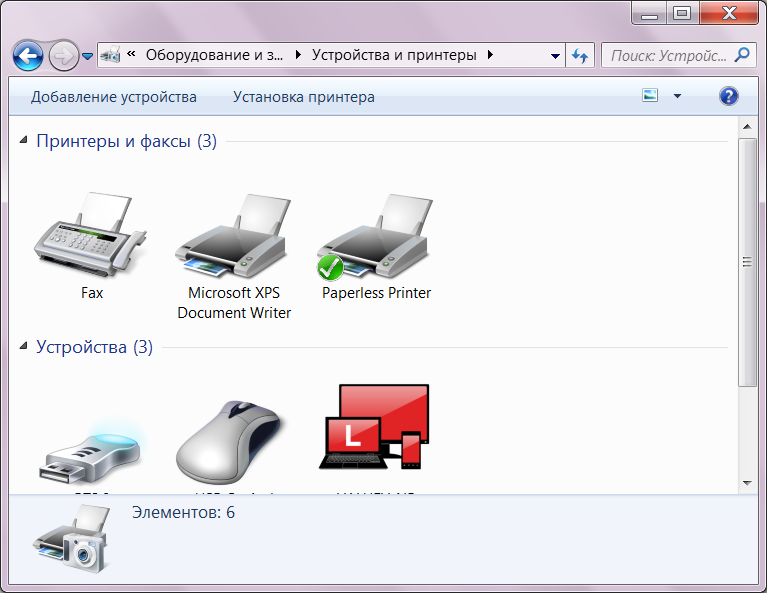
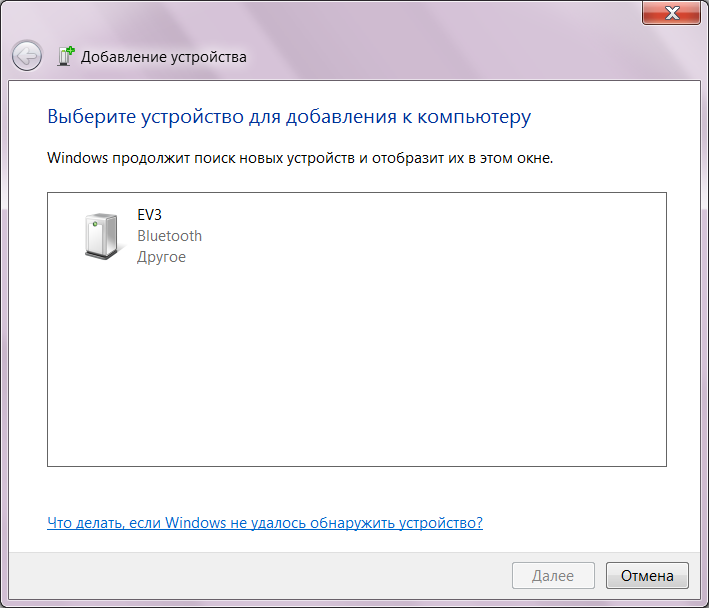
3. Удостоверьтесь, что Bluetooth компьютера включён, и нажмите сверху на кнопку «Добавление устройства ». Поднимется диалоговое окно, в котором через некоторое время должен появиться модуль EV3. Щёлкните по нему и затем щёлкните «Далее ».
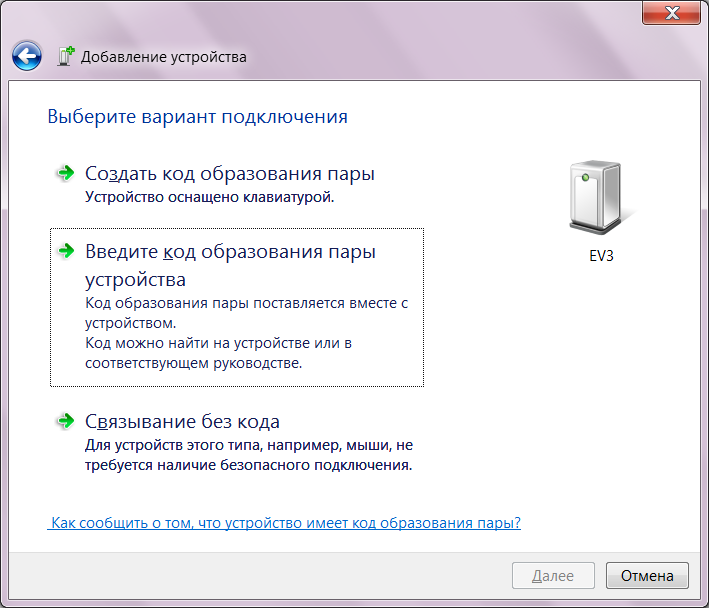
4. На следующем шаге вы увидите выбор варианта подключения. Щёлкните по второму варианту и введите PIN-код1234 .
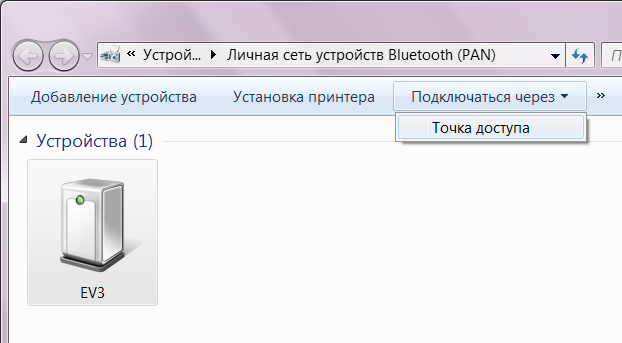
После того как модуль EV3 и компьютер подключены друг к другу можно сделать личную сеть Bluetooth (PAN ) (подключение к сети PAN вам придётся делать каждый раз при включении модуля EV3):
При программировании роботов EV3 с помощью редактора Scratch и расширения ev3-scratch-helper-app вам нужно помнить, что перед использованием моторов и датчиков их нужно подключить с помощью блоков «Подключить мотор к порту » и «Подключить датчик к порту » («Connect a motor to port » и «Connect a sensor to port » при использовании англоязычного варианта блоков). Отключаются датчики с помощью блока «Закрыть все порты » («Close all ports » в английском варианте).
Контролировать, что происходит в приложении ev3-scratch-helper-app. вы можете глядя на сообщения в консоли.
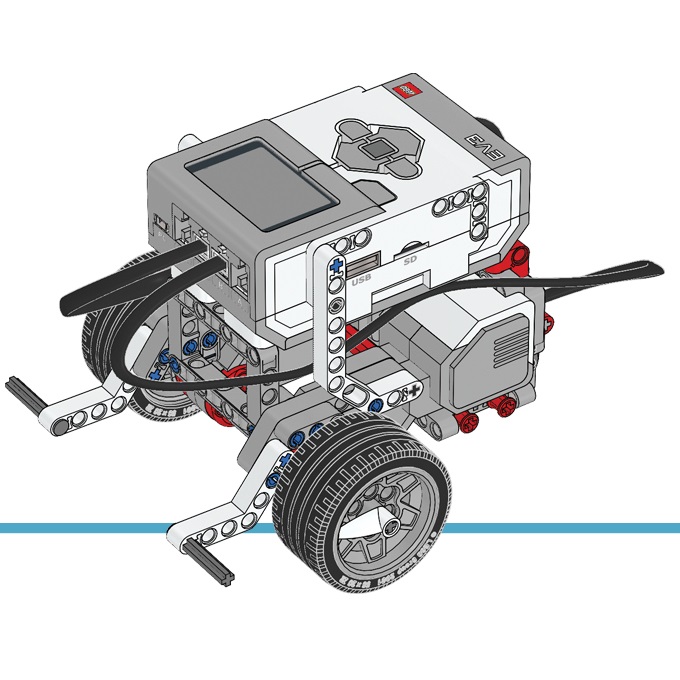
Для проверки, всё ли правильно мы настроили, соберите простейшую тележку, например, стандартную приводную платформу, и напишите для неё простейшую программу в Scratch 2. Можете посмотреть примеры в папках «doc » и «scratch\en\demos » в папке установки программы ev3-scratch-helper-app. При открытии демонстрационных программ в Scratch 2 проверьте, есть ли блоки EV3. как это было описано выше в разделе «Добавление программных блоков EV3 в редактор Scratch 2 ».
Инструкцию для сборки стандартной приводной платформы можете взять здесь:
 Инструкция для сборки стандартной приводной платформы Educator EV3
Инструкция для сборки стандартной приводной платформы Educator EV3